
Perkembangan teknologi robotik saat ini memiliki peran penting bagi kehidupan manusia di berbagai bidang, mulai dari bidang, kesehatan, pertanian, transportasi, hingga bidang teknologi manufaktur. Robot merupakan suatu perangkat mekanik yang mampu menjalankan tugas-tugas fisik, baik di bawah kendali dan pengawasan manusia, ataupun yang dijalankan dengan serangkaian program yang telah didefinisikan terlebih dahulu.
Pada saat ini jenis robot sangat beragam mulai dari yang beroda hingga robot yang berkaki dan menyerupai makhluk hidup. Robot-robot diciptakan dengan tujuann untuk mempermudah pekerjaan manusia, bahkan diharapkan dapat menggantikan pekerjaan manusia yang berat dan memiliki resiko yang tinggi.
Salah satu jenis robot yang banyak digunakan di dalam industri manufaktur adalah lengan robot. Lengan robot digunakan untuk pekerjaan-pekerjaan berulang yang memiliki resiko cukup tinggi misalnya pemasangan part, pengecatan, coating dan lain-lain. Dengan menggunakan lengan robot dapat menghemat penggunakan tenaga kerja yang cukup signifikan dalam dunia industri
Lalu bagaimana cara kerja lengan robotik? bagaimana mekanisme gerak dari lengan robot? Dan seperti apa bentuk dari lengan robot. Mari kita lihat pada pembahasan di bawah ini. Sebelumnya kita perlu memahami terlebih dahulu mengenai bagian-bagian utama dari robot. Pada umumnya robot memiliki bagian utama berupa struktur mekanis, sistem kendali dan unit penggerak (aktuator).
Struktur mekanis
Yaitu sambungan-sambungan mekanis (link) dan pasangan-pasangan (joint) yang memungkinkan untuk membuat berbagai variasi gerakan.
Sistem kendali
Sistem kendali dapat berupa kendali tetap (fixed) ataupun servo, yang dimaksud dengan sistem kendali tetap yaitu suatu kendali robot yang pengaturan gerakannya mengikuti lintasan (path), sedangkan kendali servo yaitu suatu kendali robot yang pengaturan gerakannya dilakukan secara point to point (PTP) atau titik pertitik.
Unit Penggerak (aktuator)
Seperti hidrolik, pneumatik, elektrik ataupun kombinasi dari ketiganya, dengan atau tanpa sistem transmisi. Torsi (force) dan kecepatan yang tersedia pada suatu aktuator diperlukan untuk mengendalikan posisi dan kecepatan. Transmisi diperlukan untuk menggandakan torsi. Seperti diketahui menambah torsi dapat menurunkan kecepatan, dan meningkatkan inersia efektif pada sambungan. Untuk mengurangi berat suatu sistem robot maka aktuator tidak ditempatkan pada bagian yang digerakkan, tetapi pada sambungan yang sebelumnya.
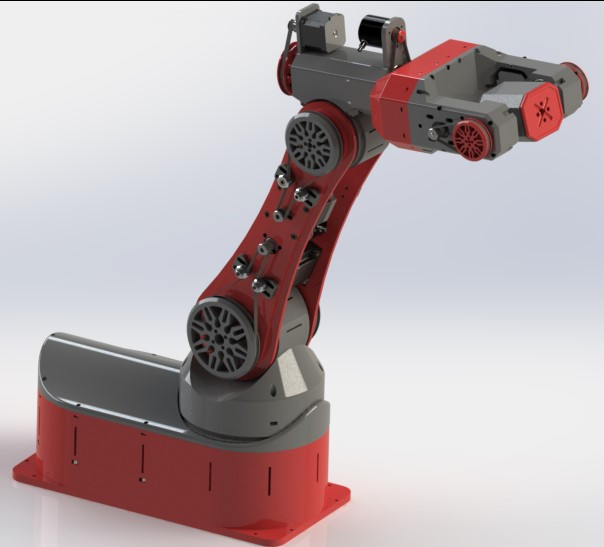
Lengan robot ( Sumber: https://grabcad.com/library/6-dof-serial-robotic-arm-3d-printable-1)
Bagian- Bagian mekanik lengan robot dapat dilihat pada gambar di bawah ini.
- Tangan Mekanik (Mechanical arm) Adalah bagian dasar dari konstruksi lengan robot untuk dapat membentuk lengan robot sesuai kebutuhan dan merupakan bagian yang dikendalikan pergerakkannya
- End-Effector Kemampuan robot juga tergantung pada piranti yang dipasang pada lengan robot. Piranti ini biasanya dikenal dengan end effector. end effector ada dua jenis yaitu Pencengkram (gripper) yang digunakan untuk memegang dan menahan objek, peralatan (tool) yang digunakan untuk melakukan operasi tertentu pada suatu objek. Contohnya: bor, penyemprot cat, gerinda, las dan sebagainya.
- Penggerak (Actuator) Istilah yang digunakan untuk mekanisme yang menggerakkan lengan robot. Aktuator dapat berupa hidrolik dan pneumatik yang digunakan untuk mengendalikan persendian prismatik karena dapat menghasilkan gerakan linier secara langsung (sering disebut dengan penggerak linier) atau pula aktuator motor listrik yang menghasilkan gerakan rotasi. Penggerak yang umum digunakan pada saat ini adalah penggerak motor servo. Penggerak ini lebih mudah dikontrol dibanding penggerak lainnya.
- Sensor/Transducer Sensor dipergunakan manipulator agar dapat berinteraksi dengan lingkungan kerjanya. Sensor juga dipergunakan sebagai input umpan balik pada proses pengendalian manipulator.
- Pengendali (Controller) Pengendali adalah mekanisme (baik secara perangkat keras maupun perangkat lunak) yang dipergunakan untuk mengatur seluruh pergerakan atau proses yang dilakukan manipulator.
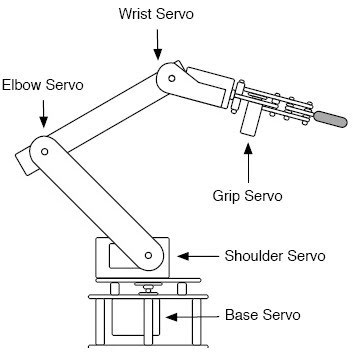
Bagian mekanik lengan robot (Sumber: http://elektronikacafe.blogspot.com/2018/10/memahami-lengan-robot-arm-robot-modular.html)
Sistem mekanik lengan robot setidaknya terdiri dari 4 atau 5 servo:
- Base servo: Bagian alas memutar kekanan atau kekiri
- Shoulder servo: Bagian lengan yang bergerak keatas atau kebawah
- Elbow servo: Bagian siku robot fungsinya sama seperti lengan robot
- Wrist Servo: Bagian pergelangan tangan bergerak keatas dan kebawah
- Grip Servo: Bagian servo yang berfungsi untuk menjepit benda kerja
