Robot adalah suatu alat yang dibuat untuk mempermudah pekerjaan manusia. Semakin berkembangnya zaman, teknologi yang satu ini semakin berkembang dan semakin canggih. Saat ini robot telah dilengkapi dengan kemampuan untuk belajar sendiri (AI). Salah satu jenis robot adalah robot line follower. Robot line follower adalah salah satu jenis robot yang sudah tidak asing lagi bagi kita dan sudah sering kita dengar. Baik itu dalam dunia pendidikan, kompetisi maupun yang lainnya.
Robot line follower dimasukkan dalam jenis robot yang memiliki prinsip kerja sederhana, dikarenakan algoritma yang sederhana, dan sangat mudah untuk dipelajari, dibuat, dan dikembangkan Sesuai namanya, robot ini akan bergerak mengikuti garis yang telah dibuat oleh manusia.
Robot ini mendeteksi garis dengan menggunakan sensor infrared yang terpasang padanya. Data hasil pembacaan sensor dikirim ke mikrokontroler, kemudian mikrokontroler akan menggunakan data tersebut untuk memutuskan arah gerak robot. Pada programnya juga dapat ditanamkan logika fuzzy dan PID untuk meningkatkan responsibilitas robot satu ini.
Jenis Robot Line Follower
Pada dasarnya robot line follower ada dua yaitu line follower Analog dan line follower Digital. Line follower analog merupakan robot yang pengolahan datanya diolah secara analog menggunakan IC Op-amp. Sedangkan line follower digital merupakan robot yang datanya diolah secara digital menggunakan IC digital maupun di program menggunakan mikrokontroller.
Bagian-bagian dan Cara Kerja Robot Line Follower
Pada pembahasan kali ini kita akan membahas tentangdesain dan skema line follower Analog besarta cara kerjanya. Desain robot line follower pada dasarnya sangat fleksibel mengenai bentuk dan dimensinya. Desain dapat dibuat dengan berbagai macam bentuk dengan catatan tetap memperhatikan peletakan bagian-bagian utama dari robot line follower. Robot line follower analog pada dasarnya terdiri dari 3 rangkaian utama, yaitu Rangkaian Sensor, Rangkaian proses / kontrol dan dan rangkaian akuator atau penggerak.
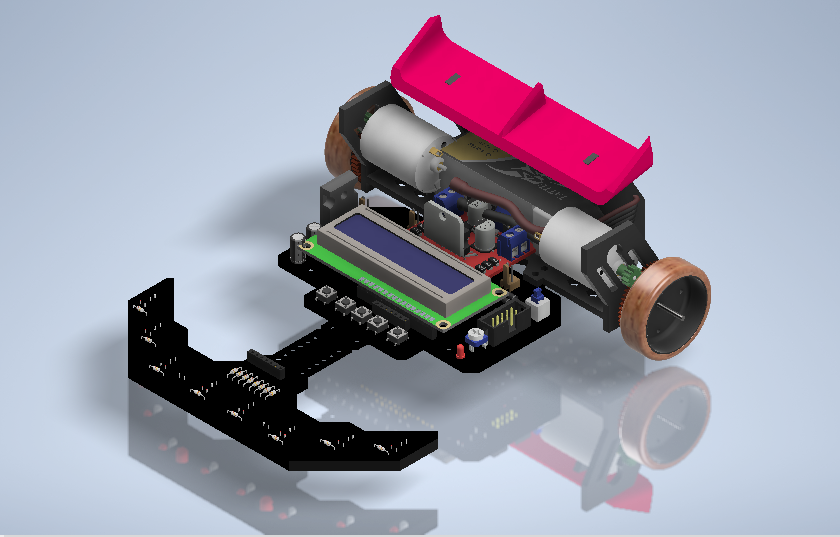
Desain Robot Line Follower (Sumber : https://grabcad.com/library/line-follower-v2-1)
Sensor pada robot line follower jumlahnya bervariasi, dapat terdiri dari 2 sensor, 4 sensor, 6 sensor bahkan 8 sensors. Data dari sensor ini akan diolah dalam IC Op – Amp yang bekerja sebagai pembanding (comparator). Untuk menggerakan motor DC menggunakan sebuah Driver yang terdiri dari driver transistor, driver relay maupun driver FET / MOSFET.
Sensor mengirimkan data jika photo dioda dalam sensor terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1. Selanjutnya pada komparator akan dibandingkan tegangan input (tegangan dari sensor) dengan tegangan referensi (tegangan dari variabel transistor). Apabila tegangan input lebih besar dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan maks power supply (high/1), apabila tegangan input lebih kecil dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan min power supply (low/0). Setelah itu, data akan dikirmkan ke driver motor yang berfungsi untuk menggerakkan motor kanan dan motor kiri.
Penerapan Robot Line Follower
Dalam dunia industri, robot line follower dimanfaatkan untuk mengangkut barang dalam jumlah kecil maupun besar dalam satu jalur yang tidak memiliki percabangan. Desain dan spesifikasi robot line follower dibuat dengan menyesuaikan fungsi yang akan dijalankannya. Jika robot line follower dirancang untuk mengangkut barang yang berat, maka kapasitas motor yang digunakan juga harus besar agar robot ini dapat menjalankan tugasnya dengan baik.
Jika ada kendala silahkan hubungi kontak kami 085868949789 – Indobot
